 English | 加入收藏 | 網(wǎng)站地圖
English | 加入收藏 | 網(wǎng)站地圖
English | 加入收藏 | 網(wǎng)站地圖
English | 加入收藏 | 網(wǎng)站地圖

面對中國市場的巨大潛力和廣闊的應(yīng)用前景,各大企業(yè)近年來不斷加大投入,積極研發(fā),擴大產(chǎn)能,不斷推出領(lǐng)先市場的各種工業(yè)機器人。機器人技術(shù)整合機器視覺及其他相關(guān)領(lǐng)域的研究成果,有機集成各領(lǐng)域的技術(shù)優(yōu)勢,應(yīng)用范圍也已經(jīng)越來越廣泛。
機器人及機器人系統(tǒng)已經(jīng)被廣泛應(yīng)用于汽車、食品、制藥等行業(yè)。據(jù)中國視覺商城了解以機器視覺為導(dǎo)向的機器人定位、識別、檢測技術(shù)已經(jīng)是全自動化領(lǐng)域一種新的標(biāo)志。
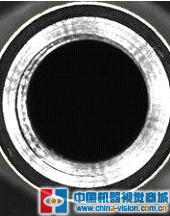
定位抓取:
在自動化的生產(chǎn)線上,有很多情況下,產(chǎn)品是無規(guī)則的排列,為了提高生產(chǎn)效率就要求機器人準(zhǔn)確迅速的找到產(chǎn)品的位置,從而進行準(zhǔn)確的抓取,進行下一步工位的操作。如圖所示為一個機械加工的零部件,從傳送帶上自動的輸送到機械手的抓取范圍內(nèi)。通過機器視覺自動捕捉到零部件的中心點,發(fā)送給機器人的控制系統(tǒng),由于該產(chǎn)品是一個中心對稱的產(chǎn)品,因此只需要定位該產(chǎn)品的中心位置即可。
機械手對位:
在一些生產(chǎn)過程中,廠家需要把兩個產(chǎn)品準(zhǔn)確的裝配在一起,利用機械手可以達到很高的裝配效率,如下圖所示A產(chǎn)品要準(zhǔn)確無誤的裝配到B產(chǎn)品上,如下圖所示。
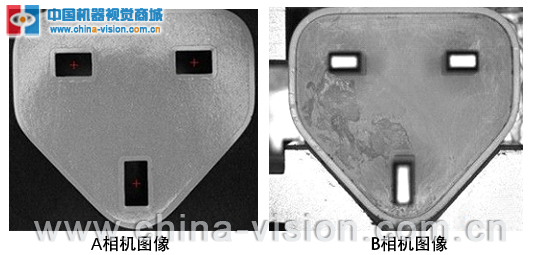
A相機將產(chǎn)品的中心點(3個)分別計算出來 ,B相機將產(chǎn)品的中心點(3個)分別計算出來,最終輸出給機械手一個X,Y和角度偏移量,來引導(dǎo)機械手抓拍A相機拍攝的產(chǎn)品貼合到B相機拍攝的產(chǎn)品

